
1. Pengenalan teknologi mesin mengait bulat
1. Pengenalan ringkas mesin mengait bulat
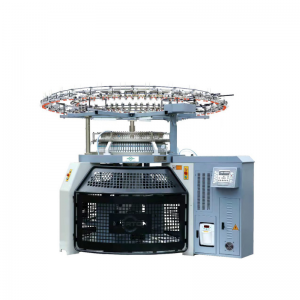
Mesin mengait bulat (seperti yang ditunjukkan dalam Rajah 1) ialah peranti yang menenun benang kapas menjadi kain berbentuk tiub. Ia digunakan terutamanya untuk mengait pelbagai jenis fabrik rajutan timbul, fabrik kemeja-T, pelbagai fabrik bercorak berlubang, dan sebagainya. Mengikut strukturnya, ia boleh dibahagikan kepada mesin mengait bulat jersi tunggal dan mesin mengait bulat jersi berganda, yang digunakan secara meluas dalam industri tekstil.
 2. Keperluan proses
2. Keperluan proses
(1) Inverter dikehendaki mempunyai rintangan alam sekitar yang kuat, kerana suhu persekitaran kerja di tapak agak tinggi, dan bulu kapas boleh menyebabkan kipas penyejuk terhenti dan rosak dengan mudah, dan lubang penyejukan tersumbat.
(2) Fungsi operasi inci fleksibel diperlukan. Butang inci dipasang di banyak tempat peralatan, dan penyongsang diperlukan untuk bertindak balas dengan cepat.
(3) Terdapat tiga kelajuan yang diperlukan dalam kawalan kelajuan. Satu ialah kelajuan operasi inci, biasanya sekitar 6Hz; yang satu lagi ialah kelajuan tenunan biasa, dengan frekuensi tertinggi sehingga 70Hz; yang ketiga ialah operasi pengumpulan kelajuan rendah, yang memerlukan frekuensi kira-kira 20Hz.
(4) Semasa operasi mesin mengait bulat, pembalikan dan putaran motor adalah dilarang sama sekali, jika tidak, jarum pada dasar jarum akan bengkok atau patah. Jika mesin mengait bulat menggunakan galas fasa tunggal, ini tidak akan dipertimbangkan. Jika sistem berputar ke hadapan dan ke belakang, ia bergantung sepenuhnya pada putaran ke hadapan dan ke belakang motor. Di satu pihak, ia perlu dapat menghalang putaran terbalik, dan di pihak yang lain, ia perlu menetapkan brek DC untuk menghapuskan putaran.
3. Keperluan prestasi
Semasa menenun, bebannya berat, dan proses menginjak/memulakan perlu cepat, yang memerlukan penyongsang mempunyai frekuensi rendah, tork besar, dan kelajuan tindak balas yang pantas. Penukar frekuensi menggunakan mod kawalan vektor untuk meningkatkan ketepatan penstabilan kelajuan motor dan output tork frekuensi rendah.
4. Pendawaian kawalan
Bahagian kawalan mesin mengait bulat menggunakan kawalan mikropengawal atau PLC + antara muka manusia-mesin. Penukar frekuensi dikawal oleh terminal untuk memulakan dan menghentikan, dan frekuensi diberikan oleh tetapan kuantiti analog atau frekuensi berbilang peringkat.
Pada asasnya terdapat dua skema kawalan untuk kawalan berbilang kelajuan. Satu adalah menggunakan analog untuk menetapkan frekuensi. Sama ada ia berjoging atau operasi berkelajuan tinggi dan berkelajuan rendah, isyarat analog dan arahan operasi diberikan oleh sistem kawalan; yang lain adalah menggunakan penukar frekuensi. Tetapan frekuensi berbilang peringkat terbina dalam, sistem kawalan memberikan isyarat pensuisan frekuensi berbilang peringkat, joging disediakan oleh penyongsang itu sendiri, dan frekuensi tenunan berkelajuan tinggi diberikan oleh kuantiti analog atau tetapan digital penyongsang.
2. Keperluan di tapak dan pelan pentauliahan
(1) Keperluan di tapak
Industri mesin mengait bulat mempunyai keperluan yang agak mudah untuk fungsi kawalan penyongsang. Secara amnya, ia disambungkan ke terminal untuk mengawal mula dan berhenti, frekuensi analog diberikan, atau berbilang kelajuan digunakan untuk menetapkan frekuensi. Operasi inci atau kelajuan rendah diperlukan untuk menjadi pantas, jadi penyongsang diperlukan untuk mengawal motor bagi menghasilkan tork frekuensi rendah yang besar pada frekuensi rendah. Secara amnya, dalam aplikasi mesin mengait bulat, mod V/F penukar frekuensi adalah mencukupi.
(2) Skim penyahpepijatan Skim yang kami gunakan ialah: Penyongsang vektor arus tanpa sensor siri C320 Kuasa: 3.7 dan 5.5KW
3. Menyahpepijat parameter dan arahan
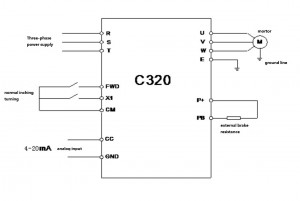
1. Gambarajah pendawaian
2. Tetapan parameter penyahpepijatan
(1) F0.0=0 Mod VF
(2) F0.1=6 frekuensi isyarat arus luaran saluran input
(3) F0.4=0001 Kawalan terminal luaran
(4) F0.6=0010 pencegahan putaran terbalik adalah sah
(5) F0.10=5 masa pecutan 5S
(6) F0.11=0.8 masa nyahpecutan 0.8S
(7) F0.16=6 frekuensi pembawa 6K
(8) F1.1=4 Rangsangan tork 4
(9) F3.0=6 Tetapkan X1 untuk joging ke hadapan
(10) F4.10=6 tetapkan frekuensi joging kepada 6HZ
(11) F4.21=3.5 Tetapkan masa pecutan jog kepada 3.5S
(12) F4.22=1.5 menetapkan masa nyahpecutan jog kepada 1.5S
Nota Penyahpepijatan
(1) Pertama, berjoging untuk menentukan arah motor.
(2) Berkenaan masalah getaran dan tindak balas perlahan semasa berjoging, masa pecutan dan nyahpecutan berjoging perlu diselaraskan mengikut keperluan.
(3) Tork frekuensi rendah boleh diperbaiki dengan melaraskan gelombang pembawa dan rangsangan tork.
(4) Bulu kapas menyekat saluran udara dan kipas terhenti, menyebabkan pelesapan haba inverter yang lemah. Keadaan ini kerap berlaku. Pada masa ini, inverter umum melangkau penggera haba dan kemudian secara manual menanggalkan habuk dalam saluran udara sebelum meneruskan penggunaannya.
Masa siaran: 8-Sep-2023